Pathfinding in C&C4
- Thread starter Kasian
- Start date

- Joined
- Jun 24, 2004
- Messages
- 1,411
- Points
- 235
Verstehe ich nicht ganz, die Einheiten haben sich im 45° winkel einen Weg um ein Hindernis gesucht? Und jetzt suchen sie den geradesten Weg bzw. den Weg mit dem geringsten Winkel?
Nicht ganz, aber nah dran würde ich sagen
")
- Joined
- Mar 30, 2008
- Messages
- 1,678
- Points
- 0
Meine Vermutung ^^ Die Pathfinding felder waren in 45° Winkel ausgelegt. Nun sind sie gerade
würde ich jetzt auch sagen
die units drehen sich erst in die richtige richtung um die eigene achse und nehmen dann den direkten weg, also deswegen diese handbewegung(benutzt WC3 auch diese art der weg findung, auf jedenfall würde ich mir das neue CnC pathfinding so wie in WC3 vorstellen)
- Joined
- Sep 26, 2002
- Messages
- 62,178
- Points
- 615
Übrigens könnt ihr euch anstatt des C&C3 Logos auch das RA3 Logo denken, da war es genauso. Aber jetzt in C&C4 folgt die Revolution! Diese Handbewegung erklärt ALLES! Ja sogar das Universum! 
Glaube aber auch, dass es 45° waren ^^
Daher hier nochmal eine bessere Grafik :
:

Da es Renos winkt löse ich mal noch nich auf ^^
Glaube aber auch, dass es 45° waren ^^
Daher hier nochmal eine bessere Grafik
:
Da es Renos winkt löse ich mal noch nich auf ^^
- Joined
- Jun 28, 2007
- Messages
- 3,984
- Points
- 270
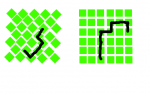
So hab mal ne bescheidene Grafik gemacht. Man stellt sich die möglichen Wegpunkte als Große Felder.
Bei dem 45 ° Iso System können die einheiten nur Rechts und Links gehen.
Bei nem Normalen Kastensystem können sie nun auch Grade aus.
Man bemerkt das nur nicht so in CNC3 und RA3, da die Wegpunkte warscheinlich verdammt nah beienander liegen ^^
Bei dem 45 ° Iso System können die einheiten nur Rechts und Links gehen.
Bei nem Normalen Kastensystem können sie nun auch Grade aus.
Man bemerkt das nur nicht so in CNC3 und RA3, da die Wegpunkte warscheinlich verdammt nah beienander liegen ^^
Attachments

- Joined
- Jun 28, 2007
- Messages
- 3,984
- Points
- 270
uuuuuuuhh nimpi
Bah heißt das jetzt Falsch oder Richtig? Scheiß Texte die man nie genau kapiert^^
EDIT: Okok nächster Vorschlag: Smoothing!
Der Winkel wird grade gemacht und gesmoothed
Hier ein Bild das ich gefunden habe^^

Last edited:
- Joined
- Nov 9, 2002
- Messages
- 1,473
- Points
- 0
Erste Vermutung:
Nehmen wir an wir hätten 10 Preds.
Diese würden sich im dritten Teil bei einem Bewegungsbefehl spreaden, also erst nen Winkel nach außen fahren, weil sie sich blockieren und dann ins Ziel.
Jetzt denken sie halt nach und der ganze Pulk fährt dahin...
Zweite:
Bei verschieden schnellen EInheiten, wenn die langsamen vor den schnellen sind, haben sie in CnC 3 blockiert und sie haben versucht außen rum zufahren oder haben es gar nicht geschafft und sind kleben geblieben.
Jetzt weichen beiden geschmeidig aneinenader leicht zu Seite aus, dass die schnellere Unit durchkommt....
Kurz:
Sie versuchen das überkrasse Pathfinding von SC II zu imitieren aber werden gnadenlos failen!
Nehmen wir an wir hätten 10 Preds.
Diese würden sich im dritten Teil bei einem Bewegungsbefehl spreaden, also erst nen Winkel nach außen fahren, weil sie sich blockieren und dann ins Ziel.
Jetzt denken sie halt nach und der ganze Pulk fährt dahin...
Zweite:
Bei verschieden schnellen EInheiten, wenn die langsamen vor den schnellen sind, haben sie in CnC 3 blockiert und sie haben versucht außen rum zufahren oder haben es gar nicht geschafft und sind kleben geblieben.
Jetzt weichen beiden geschmeidig aneinenader leicht zu Seite aus, dass die schnellere Unit durchkommt....
Kurz:
Sie versuchen das überkrasse Pathfinding von SC II zu imitieren aber werden gnadenlos failen!
- Joined
- Mar 30, 2008
- Messages
- 1,678
- Points
- 0
seit TS gibts doch dieses schräge kasten system, da war doch aber das pathfinding so das die units stets platz gemacht hatten wenn eine andere passieren wollte
bei TD und RA1 war es das normale grid aber mit den selbern pathfinding
liegt das jetzt an der 2D grafik oder könnte man was daraus schliessen?
bei TD und RA1 war es das normale grid aber mit den selbern pathfinding
liegt das jetzt an der 2D grafik oder könnte man was daraus schliessen?
- Joined
- Nov 5, 2006
- Messages
- 24,936
- Points
- 375
Wenn das Grid statt schräg nun längs liegt wäre das für schräge Bewegung dann ja sinnlos. Ich behaupte es gibt kein Grid mehr sondern exakte Koordinaten bis aufn I-Punkt und entsprechend auch Gebäude und Objekte mit exakter, zackiger Ausdehnung.
Similar threads
- Replies
- 3
- Views
- 856
- Replies
- 0
- Views
- 4K